SPI
Escrito por Carolina Branquinho
Definição#
É um protocolo de dados seriais síncronos usado por microcontroladores para comunicar-se com um ou mais dispositivos SPIs em curtas distâncias. Tipo de comunicação serial síncrona que faz uso do conceito mestre-escravo (master-slave). O gerador dos sinal de sincronismo é definido como mestre e os dispositivos que utilizam o sinal de sincronismo gerado são definidos como escravos.

Trabalha em regime de comunicação full-duplex, toda troca de dados acontece sempre em ambas as direções. Ou seja, cada bit trocado entre do Master para um Slave traz um bit do Slave para o Master.
Pinos básicos de comunicação entre dispositivos SPI#
| Pino | Nome Padrão | Significado |
|---|---|---|
| Do Master para o Slave | MOSI | Master Output Slave Input |
| Do Slave para o Master | MISO | Master Input Slave Output |
| Clock | SCLK | Serial Clock |
| Seleção de Slaves | SS | Slave Select |
Polarização do Clock e fases#
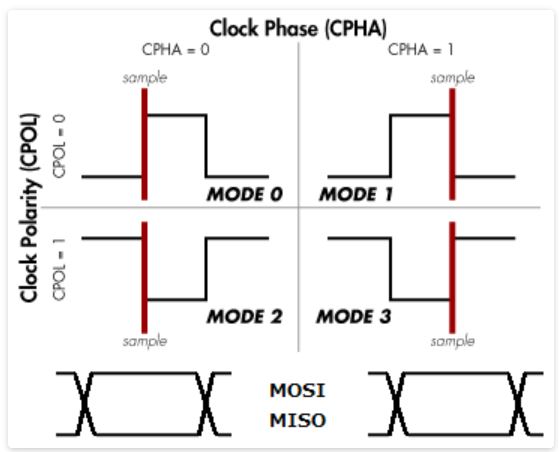
De um modo geral, existem quatro modos de transmissão. Esses modos controlam se os dados são deslocados para dentro e para fora na borda de subida ou de descida do sinal do clock (chamada de fase do clock) e se o clock está ocioso quando alto ou baixo (chamada de polaridade do clock). Os quatro modos combinam polaridade e fase de acordo com esta tabela:
| Modo | CPOL | CPHA | Borda de Saída | Captura de dados |
|---|---|---|---|---|
| SPI_MODE0 | 0 | 0 | Descida | Subida |
| SPI_MODE1 | 0 | 1 | Subida | Descida |
| SPI_MODE2 | 1 | 0 | Subida | Descida |
| SPI_MODE3 | 1 | 1 | Descida | Subida |
Polaridade do Clock (CPOL)#
- A polaridade do clock pode ser 0 ou 1.
Ex: se setar polaridade como clock em 0, ele iniciará em 0 enquanto não ocorrer a comunicação e subirá para 1 quando precisar transmitir algum dado. Na imagem abaixo o clock (SCLK) foi setado com polaridade 0 e começa a transmitir dados quando o Clock (SCLK) sobre para 1.
Fase do Clock (CPHA)#
Se CPHA = 0, a informação será gravada durante a "subida" do clock (de 0 para 1). E na "descida" do clock ocorrerá a saída da comunicação (de 1 para 0). E, se CPHA = 1, será o contrário: a informação será gravada durante a "descida" do clock (de 1 para 0). E na "subida" do clock ocorrerá a saída da comunicação (de 0 para 1).
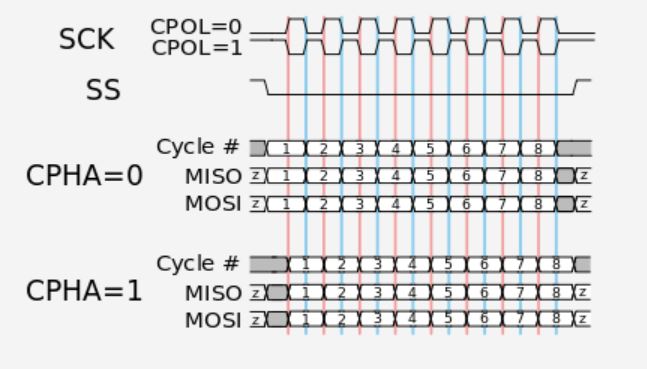
Na imagem acima podemos ver os dois exemplos de polaridade do clock, quando CPOL = 0 e CPOL = 1. Além disso, o sinal de SS, que funciona como seleção de escravo, é um sinal ativo em nível baixo. Isto que significa que o dispositivo é selecionado quando este pino se encontra em nível lógico baixo, como podemos perceber pela imagem acima.
Todas as possibilidades de arranjo entre fase e polarização do clock estão explicitadas na figura abaixo:
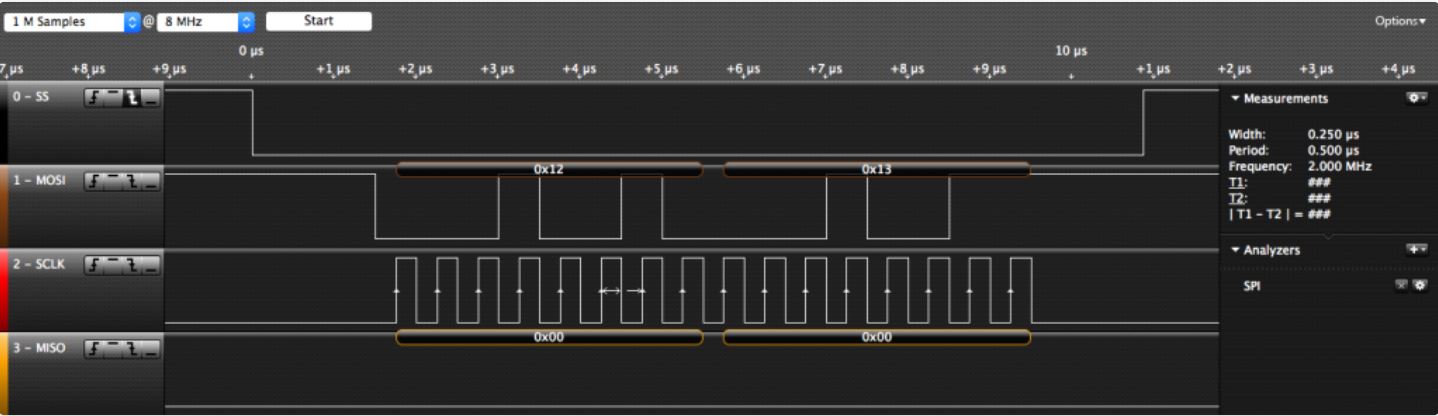
Exemplo#
No exemplo abaixo o Clock (CPOL) está polarizado em 0 e sua fase (CPHA) é igual a 0. Então a entrada da informação é recebida durante a subida do clock e a saída, durante a descida do clock.
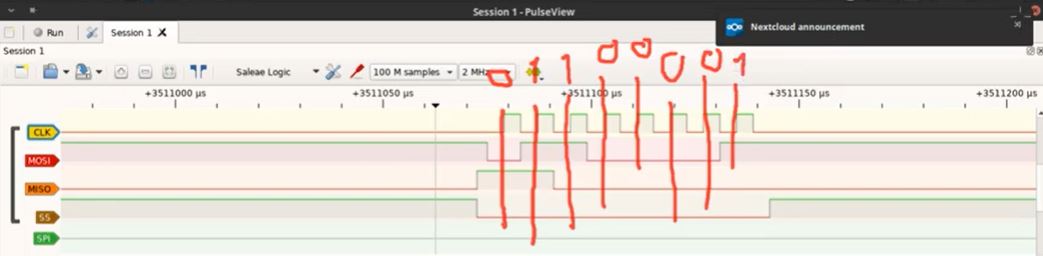
Podemos perceber que a cada mudança do clock, o MOSI (Master Output Slave Input) transmite um bit do Mestre para o Escravo. Da mesma maneira, o escravo transmite informações para o mestre, caracteristico da comunicação full-duplex. Neste exemplo, passamos como informação a letra "a" do mestre para o escravo. No alfabeto binário a letra "a" corresponde a 0110001.
Esquema Padrão de Ligação#

Nesta imagem podemos perceber o esquema padrão de Ligação da comunicação SPI. Os escravos (quadros verde, azul e roxo à direita) possuem os mesmos pinos SCLK, MOSI e MISO em comum, mas necessitam de um pino para o Slave Select (SS) para cada escravo.
OBS: O pino SS (Slave Select), cuja função é selecionar um escravo, pode ser ligado a qualquer pino digital do Arduino (que faz o papel de SPI Master).
Exemplo de Comunicação SPI com Micro SD Card Adaptor#
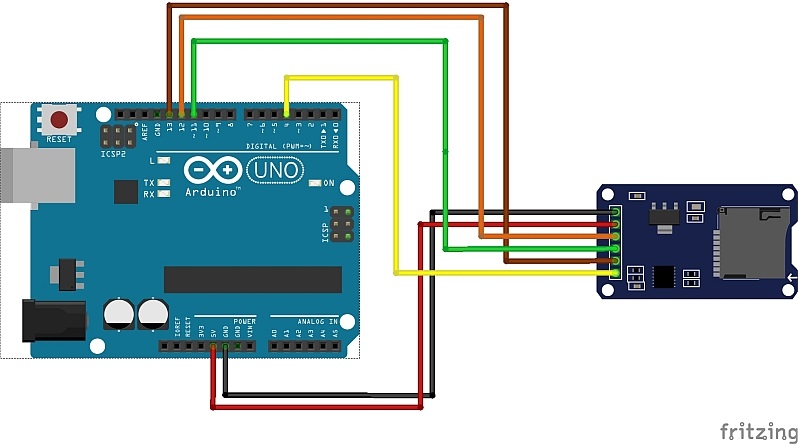
| Pino Módulo | SD Pino Arduino |
|---|---|
| SS | 4 (Jumper Amarelo) |
| SCLK | 13 (Jumper Marrom) |
| MOSI | 11 (Jumper Verde) |
| MISO | 12 (Jumper Laranja) |
| VCC | 5V (Jumper Vermelho) |
| GND | GND (Jumper Preto) |
Principais Funções da Biblioteca SPI#
Para usar esta biblioteca:
SPISettings#
O objeto SPISettings é usado para configurar a porta SPI para o seu dispositivo SPI.
speedMaximum: The maximum speed of communication. For a SPI chip rated up to 20 MHz, use 20000000.
dataOrder: MSBFIRST or LSBFIRST.
dataMode : SPI_MODE0, SPI_MODE1, SPI_MODE2, or SPI_MODE3.
begin()#
Inicializa o barramento SPI configurando SCK, MOSI e SS para saídas, puxando SCK e MOSI para baixo e SS para alto.
end()#
Desativa o barramento SPI (deixando os modos de pino inalterados).
beginTransaction()#
Inicializa o barramento SPI usando as configurações SPISettings.
endTransaction()#
Pare de usar o SPI bus. Normalmente, isso é chamado depois de cancelar a seleção do chip, para permitir que outras bibliotecas usem o barramento SPI.
setBitOrder()#
Define a ordem dos bits deslocados de e para o barramento SPI, LSBFIRST (o bit menos significativo primeiro) ou MSBFIRST (o bit mais significativo primeiro).
- order: LSBFIRST ou MSBFIRST
setClockDivider()#
Define o divisor de clock SPI em relação ao clock do sistema. Em placas baseadas em AVR, os divisores disponíveis são 2, 4, 8, 16, 32, 64 ou 128. A configuração padrão é SPI_CLOCK_DIV4, que define o clock SPI para um quarto da frequência do clock do sistema (4 Mhz para as placas a 16 MHz).
- divider:
- SPI_CLOCK_DIV2
- SPI_CLOCK_DIV4
- SPI_CLOCK_DIV8
- SPI_CLOCK_DIV16
- SPI_CLOCK_DIV32
- SPI_CLOCK_DIV64
- SPI_CLOCK_DIV128
setDataMode()#
Define o modo de dados SPI: ou seja, polaridade e fase do clock. Consulte o artigo da Wikipedia sobre SPI para obter detalhes.
- mode:
- SPI_MODE0
- SPI_MODE1
- SPI_MODE2
- SPI_MODE3
transfer(), transfer16()#
A transferência SPI é baseada em um envio e recebimento simultâneos: os dados recebidos são retornados em recebidosVal (ou recebidosVal16). No caso de transferências de buffer, os dados recebidos são armazenados no buffer local (os dados antigos são substituídos pelos dados recebidos).
val: the byte to send out over the bus
val16: the two bytes variable to send out over the bus
buffer: the array of data to be transferred
usingInterrupt()#
Se o seu programa for realizar transações SPI dentro de uma interrupção, chame esta função para registrar o número ou nome da interrupção na biblioteca SPI. Isso permite que SPI.beginTransaction() evite conflitos de uso. Observe que a interrupção especificada na chamada de usingInterrupt() será desabilitada em uma chamada para beginTransaction() e reativada em endTransaction().
- interruptNumber: the associated interrupt number.
Vantagens e Desvantagens#
Vantagens#
- O protocolo (interpretação dos dados) pode ser definido livremente, o que facilita a implementação.
- Comunicação full-duplex (comunicação mais rápida).
- Os escravos não precisam de osciladores, já que utilizam o clock do mestre.
- Os escravos não precisam de endereços únicos, como ocorre no I2C.
- Não é necessário utilizar transceivers para “decodificar”/”codificar” os dados que estão sendo enviados/recebidos.
Desvantagens#
- São necessários muitos pinos na comunicação (um para cada Slave).
- Não é ideal para longas distâncias. O SPI é um protocolo focado em uso dentro do próprio aparelho, entre integrados ou entre placas internas. Para transpor distâncias mais longas, um repetidor geralmente é necessário por causa da atenuação devido ao aumento da resistência da linha de cabos longos
- Não tem um sistema de detecção de escravos no hardware. Logo, o mestre pode enviar dados para um escravo que não existe e não saber disto.