I2C
Escrito por Matheus Parracho
O que é?#
O barramento de circuito integrado (I2C) é uma interface serial de dois fios desenvolvida originalmente pela Phillips Corporation no início da década de 90. Ele é utilizado para a comunicação entre dispositivos de maneira bem eficiente e rápida.
Hardware#
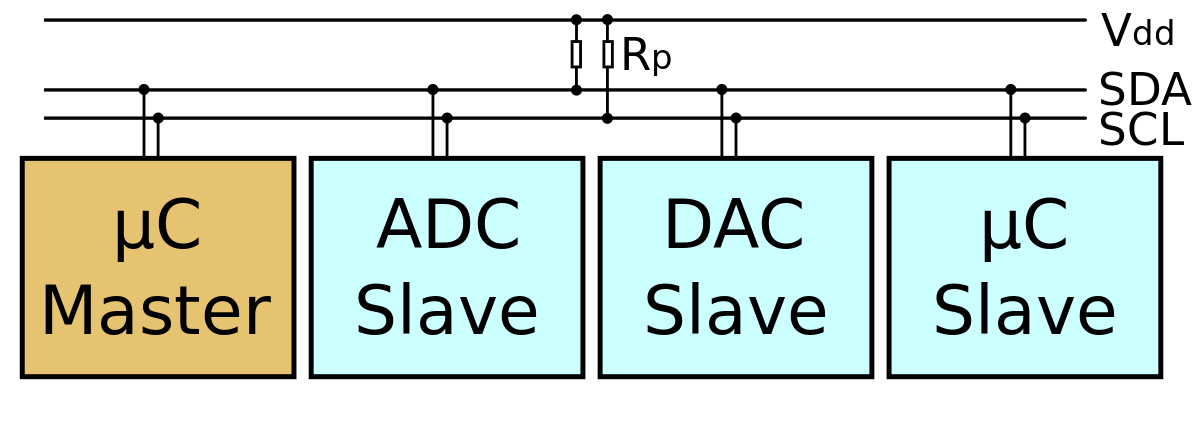
O barramento I2C é composto de dois fios, chamados de SDA (Serial Data) e SCL (Serial Clock) , além de sua alimentação (VCC), tipicamente de 3.3V ou 5V.
Este protocolo especifica dois sinais de comunicação, um com o sinal de clock - SCL (gerado pelo mestre), e outro de dados - SDA, bidirecional.
Os dispositivos são reconhecidos através de endereços, que podem ser de 7 bits, 10 bits e até 16 bits. Assim já é possível identificar uma limitação no número de dispositivos.
Além disso, outro fator complicante se torna que a montagem não pode ultrapassar poucos metros de fios, pois a capacitância total máxima, em torno de 400pf, impede o funcionamento correto do barramento nessas distâncias.
Como funciona a comunicação?#
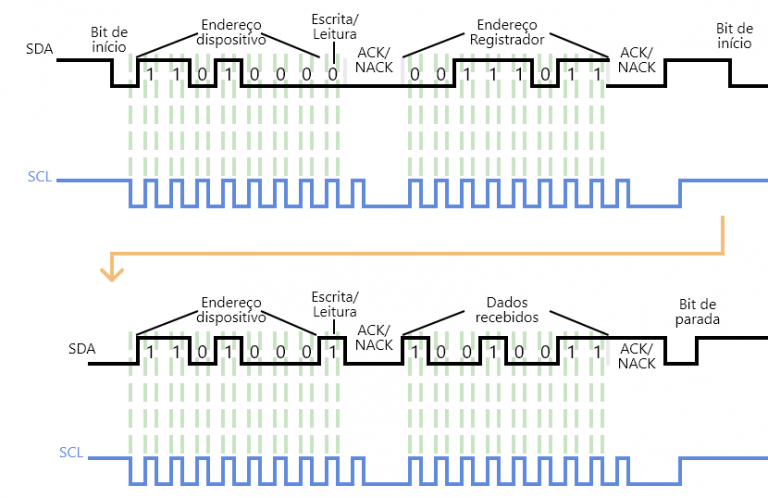
No estado neutro do barramento I2C, o valor high é mantido em ambas as linhas de comunicação. Para se iniciar a comunicação, SDA é trazido para o valor low pelo mestre. Para escrever dados no barramento, SCL pulsa, e a cada pulso, o valor em SDA é lido como um bit, começando do LSB (Least Significant Bit - Bit menos significativo).
Logo após SDA ser trazida pra baixo, o mestre escreve o endereço do dispositivo que ele deseja se comunicar, por exemplo 0xC0, caso o dispositivo exista, ele responderá como um ACK (Acknowledgement - Reconhecimento), um pulso na linha SCL. Então começa a transferência de dados, o mestre escreve o endereço do registrador no escravo que ele deseja ler ou escrever (R/W) e opera então, em sequencia, podendo ler/escrever um ou mais registrador.
No Arduino#
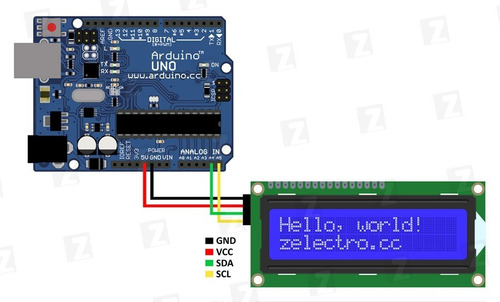
Para a comunicação com o arduino, basta ligarmos a porta A5 no SCL e o A4 no SDA, como mostrado na figura abaixo:
A documentação da biblioteca responsável para a comunicação I2C pode ser encontrada na descrição do Wire.h.
E abaixo temos um exemplo mostrando a comunicação entre Arduinos utilizando o protocolo I2C. É responsável por alterar o estado do LED conectado a placa Slave quando o botao ligado a placa Master for pressionado.
Código do MASTER:
Código do SLAVE: